香港大学Alan C. H. Tsang团队《Advanced Science》: 可重构多级整流器用于三维液体操控
发布日期:2024-08-02
浏览量:1615次
在微尺度下,可控液体操控技术广泛应用于各类生命系统和工程领域。研究人员通过界面科学理论和生物学的启发,利用精密加工和开发智能材料,在近二十年间提出了一系列的液体操控技术,满足了微流控、生化分析等领域对精密稳定的液体操作需求。当前的技术思路主要分为两类:第一类是利用无需能量输入的被动静态结构来调控液体动力学,如猪笼草上的定向液体输运和蛛网结构的集水现象;第二类是通过引入动态外部场来实现复杂可调的液体行为,如利用电场、磁场、声场等对液体进行主动调控。当下关键挑战在于,如何构建一种兼具被动操作简单性和主动调控灵活性的新型液体操控范式,这是未来液体操控技术迈向实用化的重要一步。

近日,香港大学机械工程系Alan C. H. Tsang教授团队提出了一种简单、可调的三维液体操控范式,通过耦合可重构分级整流器和预编程静态磁场,实现了固液界面能的灵活调控。这种新范式支持基于简化系统的多模态、高灵活性和易拓展的液体操控,不仅消除了对外场实时控制需求,还显著增加了结构化界面对液体操控的可能性(图1),从而打破了传统液体操控的局限性,为下一代液体检测设备、微流体器件和自动生化平台等应用奠定了基础。
相关成果以“Reconfigurability-Encoded Hierarchical Rectifiers for Versatile 3D Liquid Manipulation”为题发表在学术期刊《Advanced Science》上,香港大学机械系博士研究生苗佳麒为本文第一作者,Alan C. H. Tsang教授为本文通讯作者,香港大学为该论文的唯一通信单位。
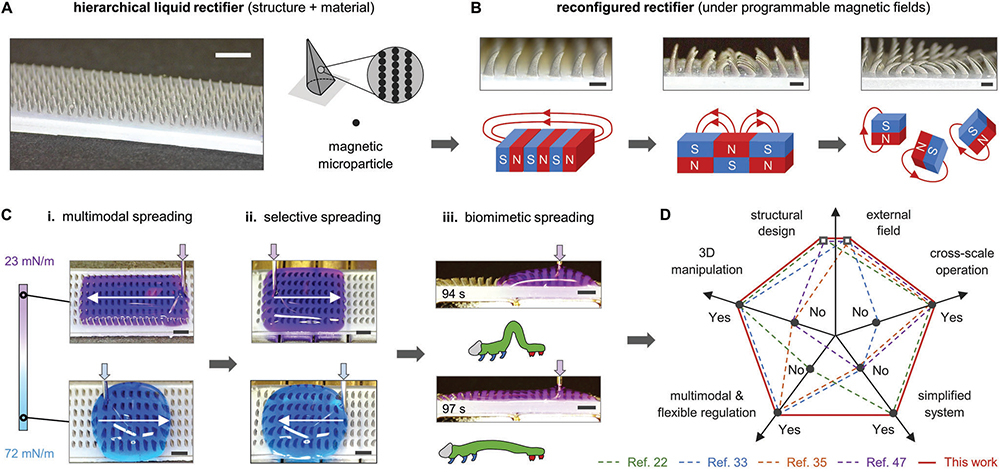
图1. 提出的三维液体操控新范式和与过往研究的比对。
研究团队设计了一种含有软基底和磁化微棘轮阵列的可重构液体整流器。微棘轮结构具有微米尺度的多级结构特征,包括底部曲率和异质倾斜锥体。为满足其加工需求,团队采用摩方精密microArch® S240(精度:10 μm)3D打印设备,制备了整流器模板,并结合翻模技术制备了样品。图2示意了这一加工过程,并提供了对整流器结构和材料的详细表征。新型液体操控范式的另一核心元素是由外部小型N52硬磁体阵列构造的预编程静态磁场。研究团队设计了标准化的磁场配置方案,包括准匀强磁场和周期性梯度磁场,并系统性研究了不同磁场条件下整流器的构型变化,以提供通用化的指导(图2)。
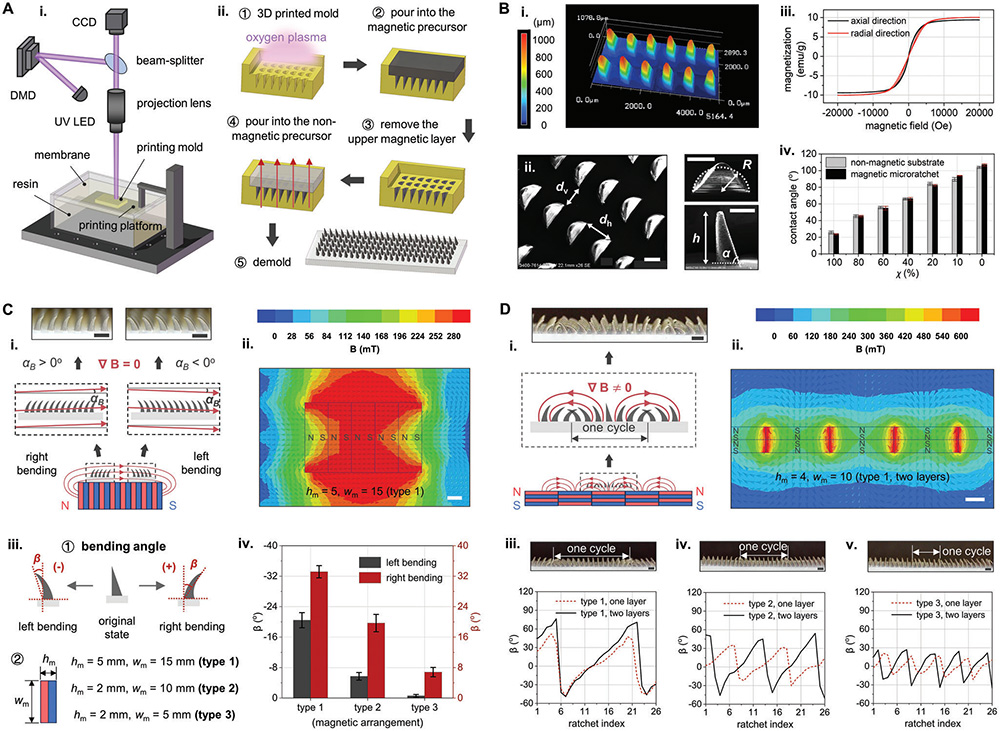
图2. 整流器的加工与表征;磁场的标准化与校准。
整流器的微棘轮结构通过调控液固界面能实现对宽范围表面张力液体(23-72 mN/m)的定向操控(图3)。较低表面张力液体由底部曲率构造的拉普拉斯压力不对称引导至X-方向(直通模式);由于受到顶部异质结构的影响,较高表面张力液体在X-方向液体前进线被阻断,导致其向相反的X+方向定向填充微棘轮(重入模式)。以乙醇-水二元液体体系为例,研究团队系统分析了不同表面张力液体在XY面的运输行为,并提供了对整流器的通用性评估(图3),包括:①讨论了高注入流速下惯性介导的流动状态变化(用韦伯数We来衡量);②揭示了棘轮设计中的尺度依赖效应,即在合适尺度下整流器才可以呈现多模态液体操控。
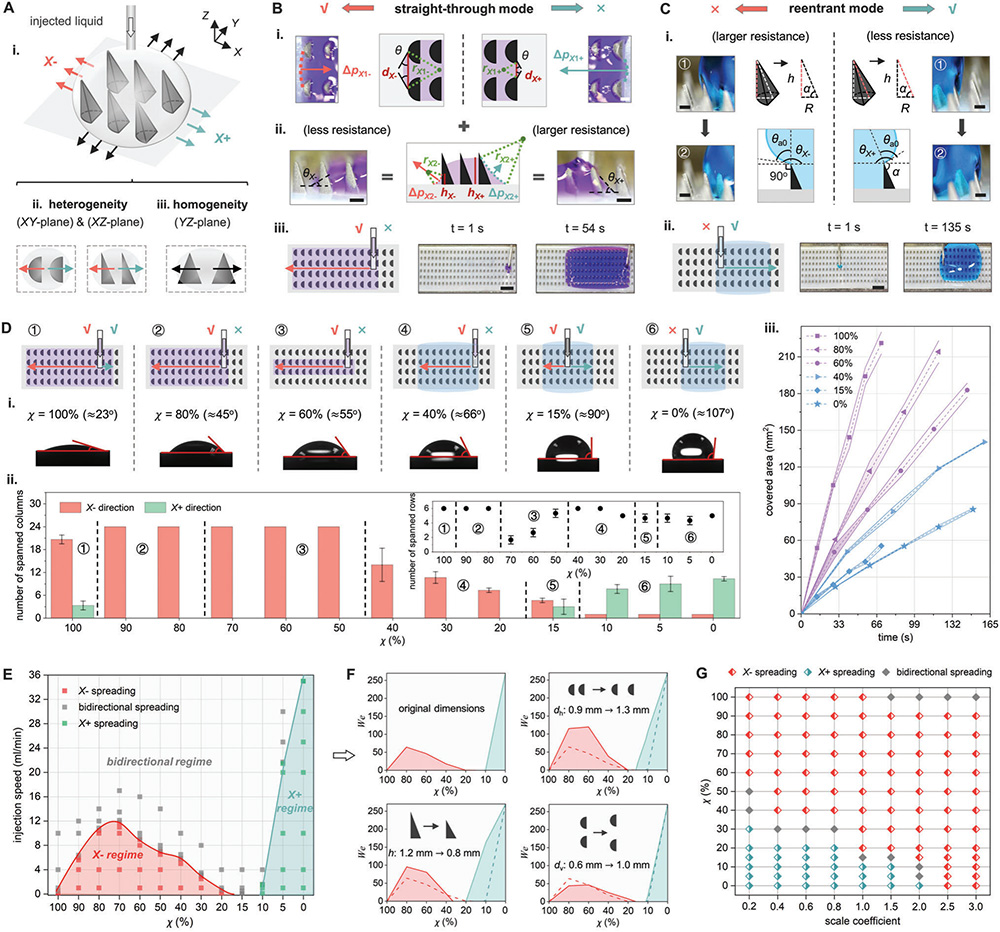
图3. 整流器引导定向液体运输的机制、多模态性和通用性。
引入预编程磁场后,整流器构型设计变得丰富多样,这使得重构形态的整流器相比原构型具有更灵活和复杂的液体操控能力(图4)。研究团队首先分析了准匀强磁场的方向和强度如何影响整流器对液体的调控,包括改善液体整流效果和调控特定表面张力液体的输运方向。当使用更复杂的非均匀磁场时,原构型下的整流规则将发生变化。具体地,研究团队展示了梯度磁场下的时空可控的直通式定向液体运输,以及注入位置决定的单/双向重入式液体运输。这些结果表明,通过预编程磁场激发的重构整流器可支持更复杂的液体调控,且这些调控基于静态构型,从而免去了实时外场干预带来的复杂性,具有很大的应用潜力。
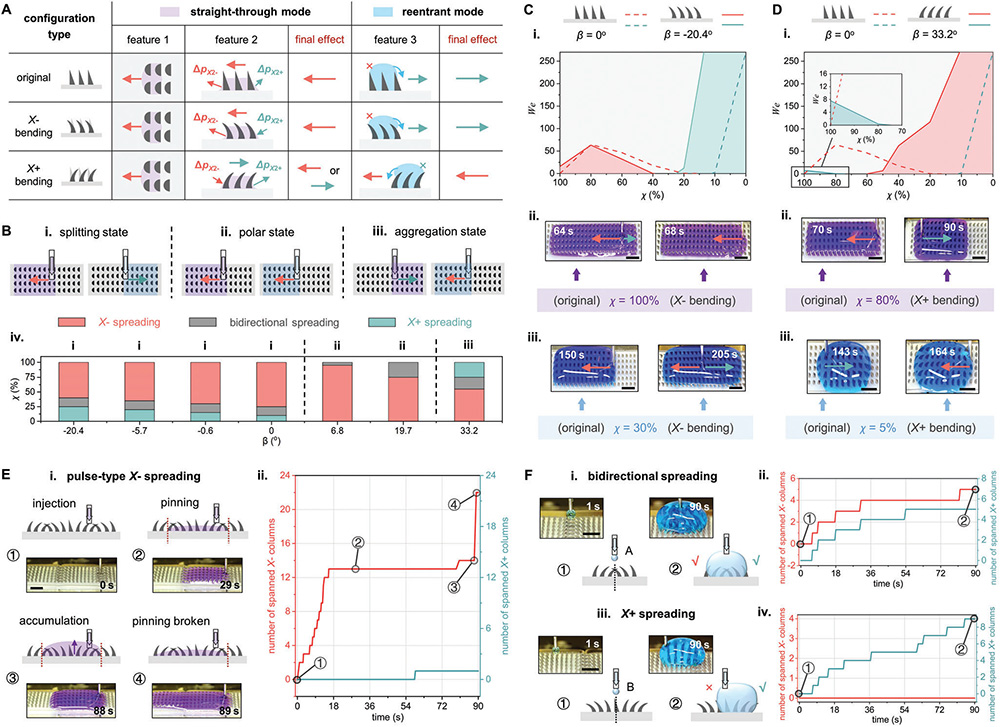
图4. 重构整流器中增强了的三维液体操控灵活性。
研究团队基于所提液体操控范式进一步拓展了几类潜在应用(图5):①新颖的界面毛细现象支持的便携式液体纯度检测;②模拟尺蠖的液体定向“蠕动”;③逻辑化液体运输系统;④时空可控的自动化生化分析平台。
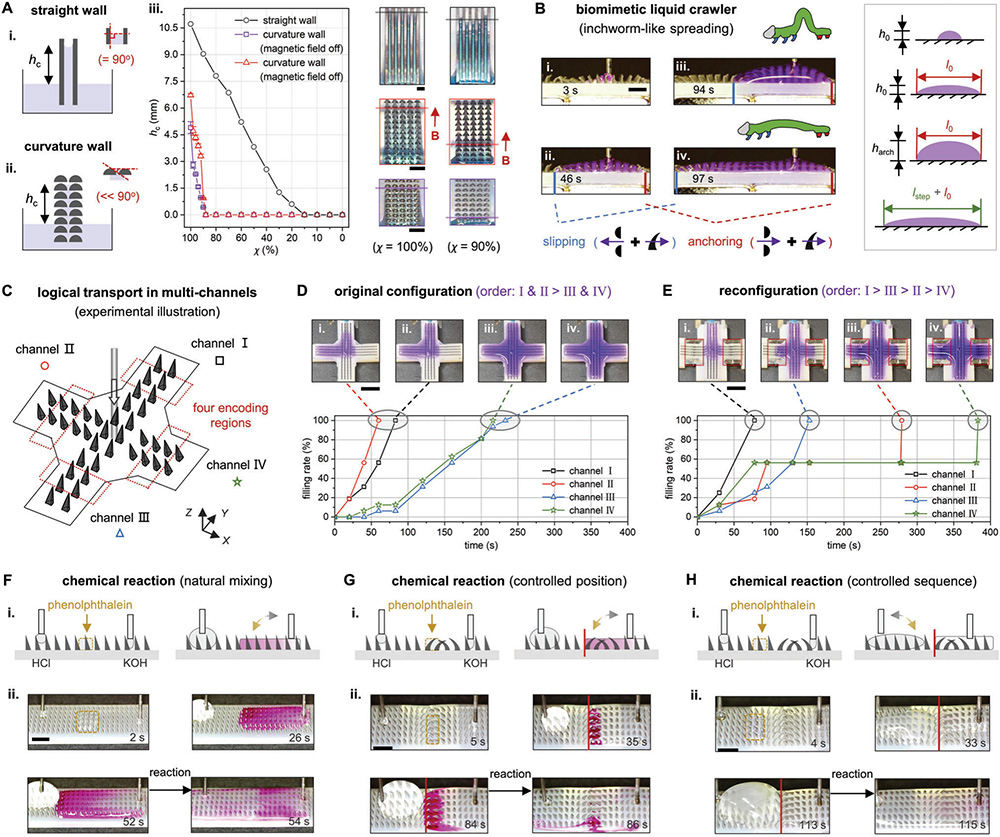
图5. 基于所提液体操纵范式的多功能整流器。
综上,研究团队提出了一种结合多模态液体整流器和可编程磁场的新型液体操控范式。该范式通过紧密地集成结构设计和外部驱动磁场,实现了界面能的按需调节,以丰富液体的三维操控。其优势在于整流器的高性能引导能力和广泛适用性,以及磁场干预方案的简单性和可扩展性。这类可重构系统已被证明在便携式液体识别、开放通道微流体、即时诊断设备等应用中具有巨大潜力。从更广泛的角度来看,拟议的液体操控范式也可以扩展到各种外场和表面结构的耦合方法之中,并在复杂的多相界面操作中发挥作用。这些进展为创新液体操控器件的设计和开发提供了新的理论基础和实践范式。
原文链接:
https://doi.org/10.1002/advs.202405641