香港中文大学张立团队:基于屈曲不稳定性编码的非均质磁化实现软材料结构动态形貌的调控
发布日期:2022-12-19
浏览量:1873次

拥有主动变形能力的三维可变形结构在自然界中广泛存在,可有效提高生物对复杂环境的适应性。受这一特性启发,研究人员已开发了多种基于水凝胶、液晶高分子、硅胶弹性体等的软材料体系,在外界不同条件的刺激下(如化学溶剂、温度、酸碱度、光等),实现了各式三维结构的可控形貌变换(Nature 2021, 592, 386;Nature 2019, 573, 205;Nature 2017 , 546, 632)。 但是,目前已有的方案主要基于软材料形貌的准静态调制,如何实现多种尺度下多模态各向异性形貌与结构的动态调控,非常具有挑战性。
近期,香港中文大学张立教授团队与哈尔滨工业大学(深圳)金东东副教授,联合香港城市大学张甲晨教授、中国科学技术大学王柳教授,提出了一种新型的软材料结构动态形貌调控方法。该团队结合硬磁性颗粒与弹性体制备得到磁性弹性体,并使其在一端受限的条件下溶胀产生可控的屈曲结构,接着加以磁化形成各向异性的三维磁畴分布。得到的磁性弹性体在外界可编程磁场的驱动下,能够实现多模态三维形貌的动态可控变换,在微流体操纵、软体机器人等领域中具有广阔的应用前景。相关研究成果以 “Dynamic morphological transformations in soft architected materials via buckling instability encoded heterogeneous magnetization” 为题发表在国际著名期刊《Nature Communications》。

图 1. 条带形与晶格状磁性弹性体的动态形貌调控示意图。
如图1所示,该研究首先将未充磁的钕铁硼微颗粒掺入硅胶弹性体前驱体中,在亲水修饰的玻璃基底上固化形成一端固定的条形或晶格结构。接着将其置于与硅胶极性相似的有机溶剂中(如甲苯、正己烷等),由于溶剂分子被弹性体吸收并扩散至高分子网络中,引发磁性弹性体的溶胀行为。但是,由于一端受到基板约束,磁性弹性体溶胀形成的轴向压缩力只能使其非均质变形,最终产生屈曲结构。屈曲结构的具体三维形貌可通过弹性体的三维尺寸、人造缺陷乃至晶格连接方式进行精准调控。此后,将屈曲变形的磁性弹性体置于强脉冲磁场下(约2.5T)磁化,再浸泡于不相溶的溶剂中(如乙醇)收缩至原始的条形或晶格结构,能够得到一定程度上“记忆”屈曲变形形貌的三维磁畴分布。此时,施加不同强度、方向或梯度的外加驱动磁场,磁性弹性体基于内部磁畴与外加磁场的磁偶极相互作用,便可产生如波浪、褶皱等的多模态动态三维变形。
这种基于不稳定性屈曲变形设计并排布软材料内部磁畴取向(即“磁编程”)的方法,无需额外的模板设计与辅助,便可快速实现各向异性的非均匀磁化分布的。结合外加可调制磁场的精准驱动,能够产生自由度远超准静态形貌调制的多模态动态形貌变换。此外,如图2所示,为了阐明磁性弹性体的调控机制,该研究团队开发了一套分析模型与有限元计算方法,在条形和晶格结构屈曲变形、充磁乃至磁控变形的过程中,可有效反映并预测各参数对动态形貌的影响行为,可为今后磁性软体材料的设计和开发提供一定参考。
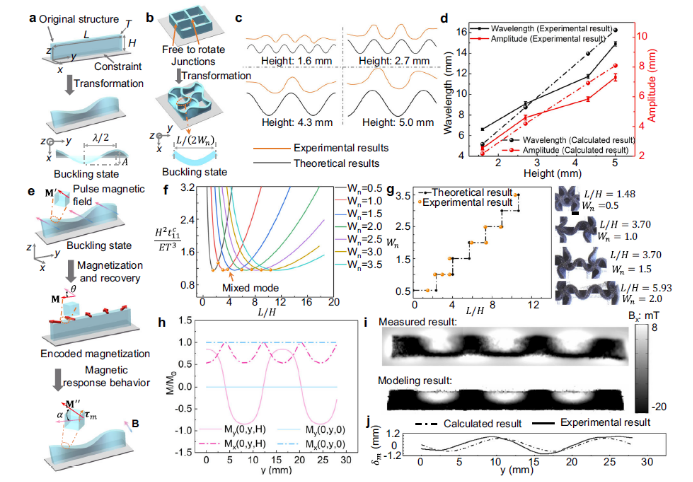
图 2. 屈曲变形编码的磁性弹性体的理论分析模型。(a-b)条带形与晶格状磁性弹性体的屈曲变形模型。(c-d)条带形磁性弹性体的理论与实际屈曲变形行为。(e)条带形磁性弹性体的磁化与磁驱动变形模型。(f-g)条带形磁性弹性体在不同几何尺寸与连接条件下的理论与实际屈曲变形行为。(h-i)条带形磁性弹性体的理论与实际磁畴取向分布。(j)条带形磁性弹性体的理论与实际磁驱动变形行为。
最后,通过利用各式屈曲变形产生的不同微流体行为(如定向流体、混合流体、涡流),该研究结合高精度3D打印技术(摩方精密nanoArch S130)制备的微型模板、微流控芯片和尺寸定制的微颗粒,成功将磁性弹性体用于液滴的可控融合与精准操控(图3),颗粒的尺寸筛选,微液滴的富集检测,微流控的混合增强,以及软体机器人的可控驱动(图4)。总之,香港中文大学张立教授团队与哈尔滨工业大学(深圳)金东东副教授提出了一种利用屈曲不稳定现象编码的新型磁编程方式,用以实现软材料结构形貌的动态调控,为今后磁性软材料跨尺度的多模态变形行为提供了一种研究手段,有助于今后更好地理解自然界中复杂形貌变换的潜在机制,拓展可变形结构在格式工程领域的应用价值。
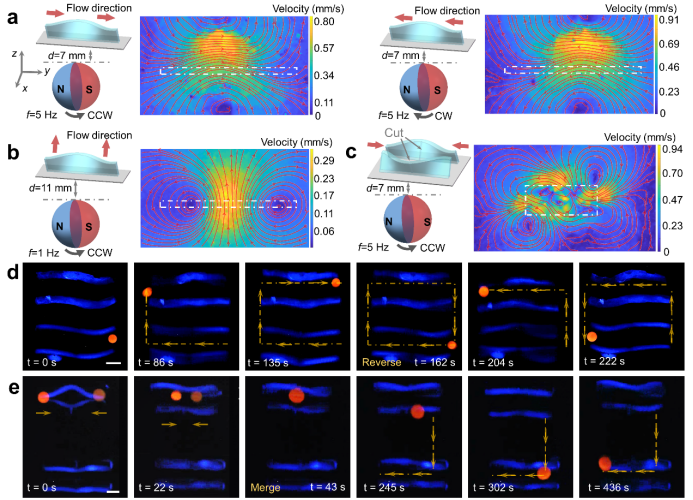
图 3. 屈曲变形编码的条形磁性弹性体在外加驱动磁场下的动态行为。a-c. 不同磁场参数下产生的不同微流体分布。d-e. 在液滴融合与可控运输中的应用。

图 4. 屈曲变形编码的磁性弹性体在微颗粒尺寸筛选(a),微液滴富集检测(b),微流控辅助混合(c),软体机器人运动控制(d)中的应用示例。
原文链接:
https://doi.org/10.1038/s41467-022-35212-6