南方科大郭传飞教授、香港大学方绚莱教授等人《PNAS》:基于数据驱动的柔性压力传感器逆向设计
发布日期:2024-08-16
浏览量:1247次
柔性压力传感器能够仿效人类皮肤的机械感受器,将触觉刺激转换为定量的电信号,在智能机器人、健康监测和人机接口等领域展现出广阔的应用前景。传统的传感器设计通常依赖于耗时的实验和模拟过程,通过正向结构-性能的设计路径逐步探索可能的解决方案。这种方式不仅耗费时间和资源,而且每次实验往往只能针对特定材料找到一个优化的结构,难以实现广泛的线性响应。相比之下,逆向设计方法则从预期的输出特性入手,推导出所需的输入参数,理论上能够更高效地达到目标功能。然而,传感器的应用场景和设计需求多样复杂,导致常规依赖大量数据的设计方法难以有效执行(如图1)。因此,如何减少所需的数据量并实现高效的逆向设计,成为推动柔性压力传感器领域发展的关键问题。
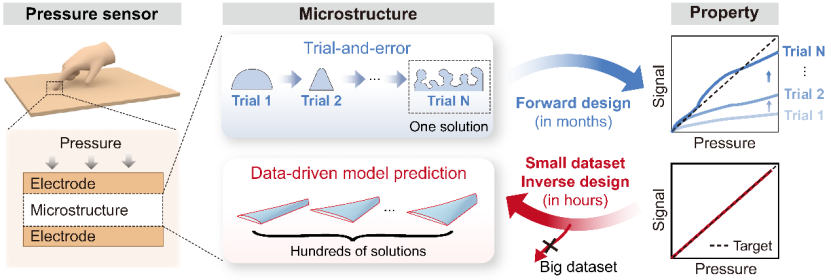
图1 柔性压力传感器正向与逆向设计方法示意图
为了克服这些挑战,南方科技大学郭传飞教授、香港大学方绚莱教授研究团队合作提出了一种高效的逆向设计方法,通过引入降阶模型来限制设计范围,并提出了“跳跃选择”方法以提高数据筛选效率。相关成果以“Data-driven inverse design of flexible pressure sensors”为题发表在《美国国家科学院院刊》(PNAS)上。这项研究的主要贡献者包括刘之光、蔡旻堃、洪申达、石君利等人。通讯作者为南方科大郭传飞教授和香港大学方绚莱教授。南方科技大学为该论文的第一通信单位。
具体而言,降阶模型通过解析方法确定内部约束条件,避免了昂贵的实验和模拟,大幅降低了模型分析的成本。该方法通过限制设计范围,将设计空间缩小至原先的四分之一甚至更少,从而减少了数据需求量(如图2所示)。此外,“跳跃选择”方法通过训练代理模型来预测结构性能评分,并迭代更新数据集和模型,以六倍于传统随机选择的效率进行数据筛选,从而快速找到具有高线性响应的微结构设计方案(如图3所示)。
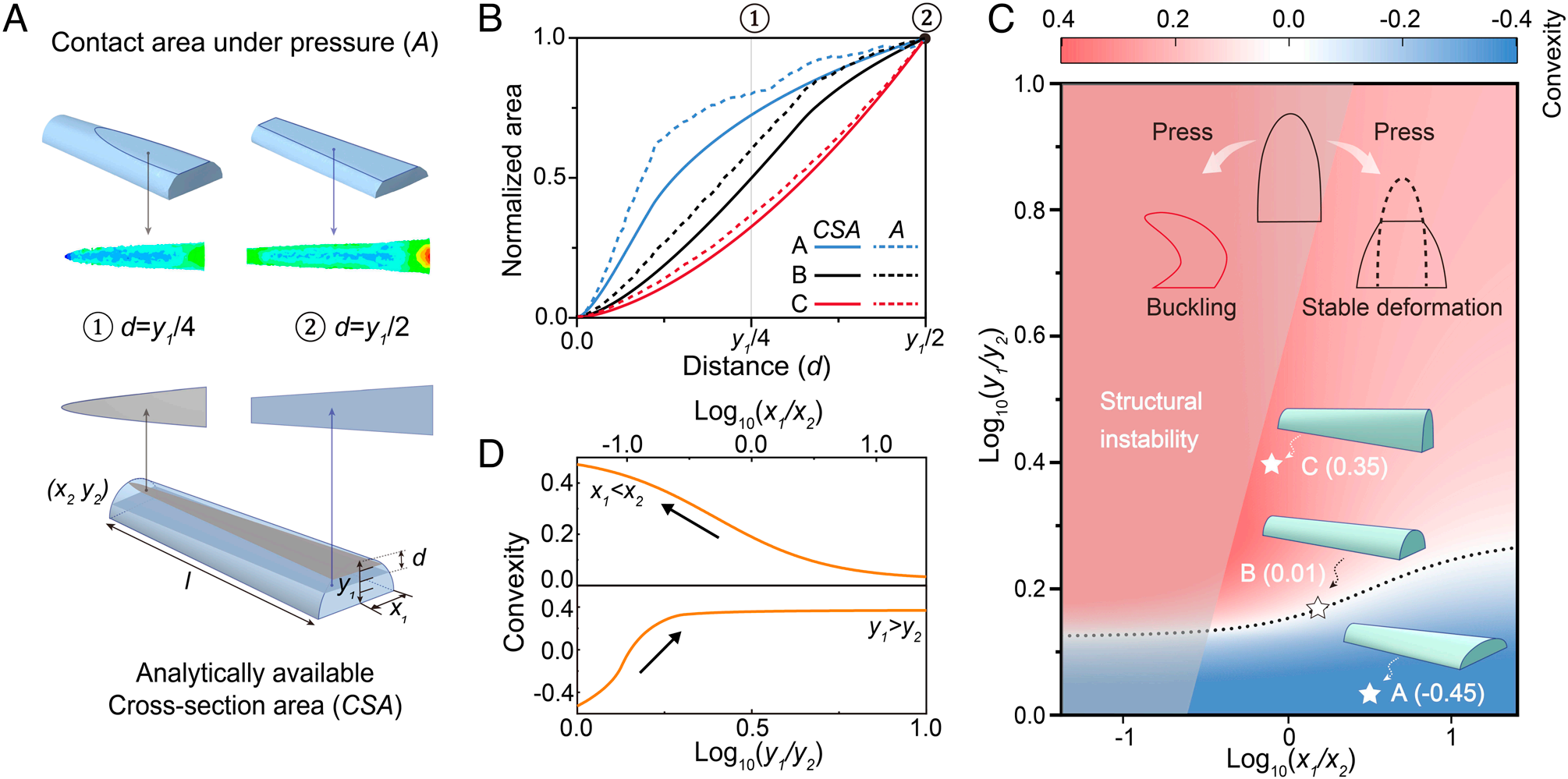
图2 降阶模型(reduced order model)接触分析
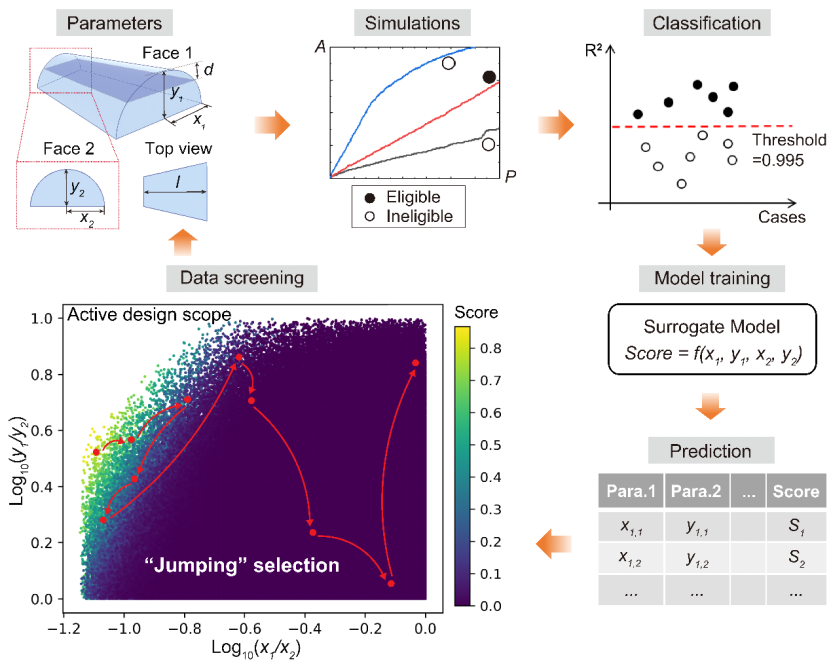
图3 跳跃选择(Jumping selection)方法
通过应用这一高效的逆向设计方法,研究团队成功预测并实验证明了多种具备线性响应的柔性压力传感器微结构设计(如图4所示)。实验结果表明,这些传感器在动态和循环加载条件下表现出卓越的线性特性和灵敏度。尤其是,设计的线性传感器阵列在各种位置和加载条件下,均能输出与负载成正比的总电容信号,从而大幅简化了数据处理的复杂性。
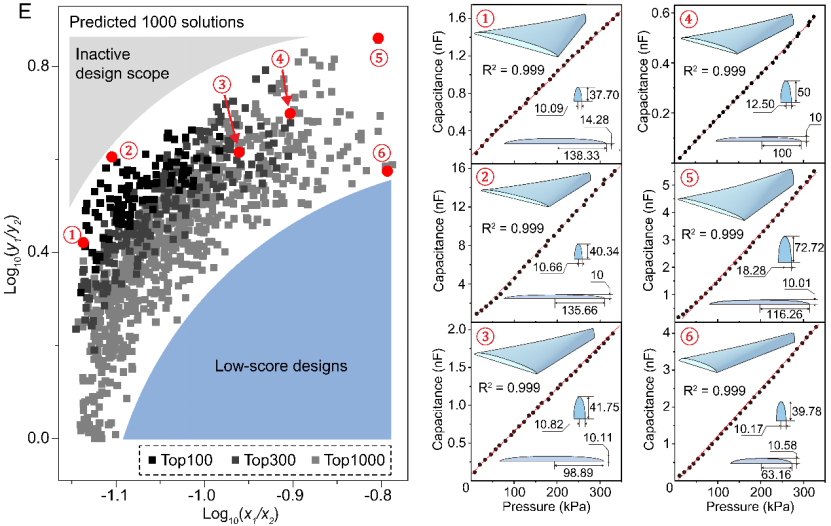
图4 逆向设计方法预测的线性响应结构与实验验证
团队采用摩方精密nanoArch® S130(精度:2 μm)3D打印设备,实现了所设计的复杂凸起结构模板的高精度打印(最小横向宽度:10 μm,高度范围:10~73 μm),并结合翻模技术制备了柔性PVA-H3PO4微结构离电功能层(图5)。
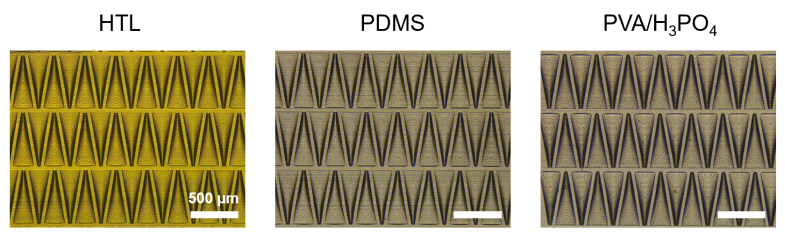
图5 高精准度的3D打印树脂、PDMS、离子凝胶结构的显微镜照片
此外,所设计结构的线性响应还能够应用于多种不同材料和测试条件,证明了该方法的广泛适用性和有效性,为智能机器人、高级医疗和人机接口等多种应用场景提供了器件设计的技术途径(如图6)。
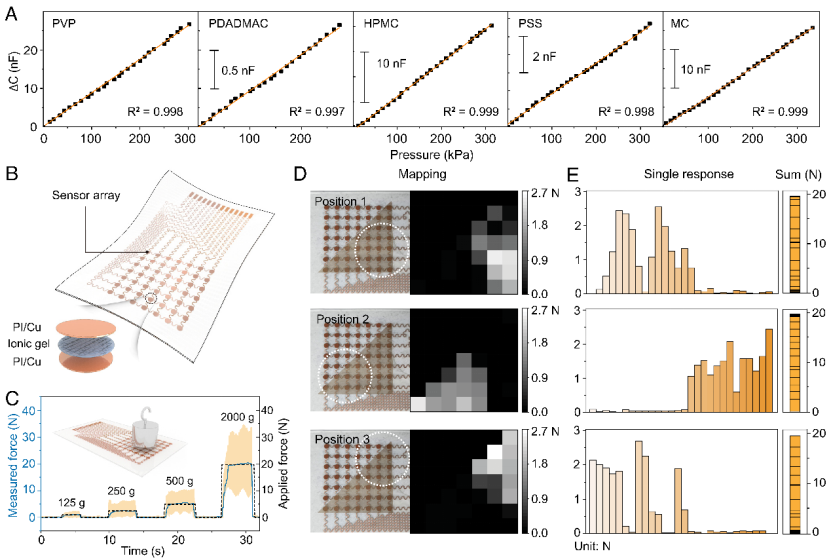
图6 多材料、多加载条件下的线性响应
本研究得到了国家自然科学基金、广东省科技厅和深圳市科创局的支持。
原文链接:https://doi.org/10.1073/pnas.2320222121