浙大谢涛、浙理工彭文俊《Science Advances》:双网络聚合顺序调控可3D打印液晶弹性体的驱动模式
发布日期:2024-09-27
浏览量:1013次
液晶弹性体(LCE)能够响应外部刺激进行可编程的可逆大尺度变形,在人工肌肉、软体机器人和微机械系统等领域具有巨大的应用潜力。LCE实现可逆驱动的必要条件是液晶基元的取向,而机械拉伸是一种简单可靠的取向液晶基元的方法。但此时液晶基元通常沿拉伸方向排列,这导致LCE展现出单一的驱动模式,即在拉伸编程方向上表现出冷却诱导延长。
鉴于此,浙江大学化学工程与生物学院谢涛教授和陈冠聪博士报道了一种由液晶和聚氨酯弹性体组成的互穿双网络,调整两重网络的聚合顺序,材料表现出两种相反的驱动模式,即传统的冷却诱导延长或反常的冷却诱导收缩。该工作以“Pluralizing actuation behavior of 3D printable liquid crystal elastomers via polymerization sequence control”为题发表在《Science Advances》上。浙江大学谢涛教授和陈冠聪博士为共同通讯作者,浙江理工大学特聘研究员彭文俊为第一作者,该研究工作受到了浙江理工大学张先明教授的相关支持,论文第一单位为浙江理工大学。
本工作设计的双网络是可光固化的液晶网络和聚氨酯网络。作者将第一重液晶网络聚合后溶胀聚氨酯单体,并在拉伸状态下聚合第二重聚氨酯网络,此时液晶基元沿拉伸方向排列,得到冷延长的驱动器LCE/PU(图1B);反之,将第一重聚氨酯网络聚合后溶胀液晶单体,并在拉伸状态下聚合第二重液晶网络,聚氨酯弹性体的回弹力使得液晶基元沿垂直拉伸方向排列,得到冷收缩的驱动器PU/LCE(图1C)。本工作的延长和收缩都是相对于拉伸编程的方向定义的。图1E中的WAXD证实了不同的液晶基元取向方向,因此LCE/PU样条冷却时延长,加热时收缩,而PU/LCE样条冷却时收缩,加热时延长。
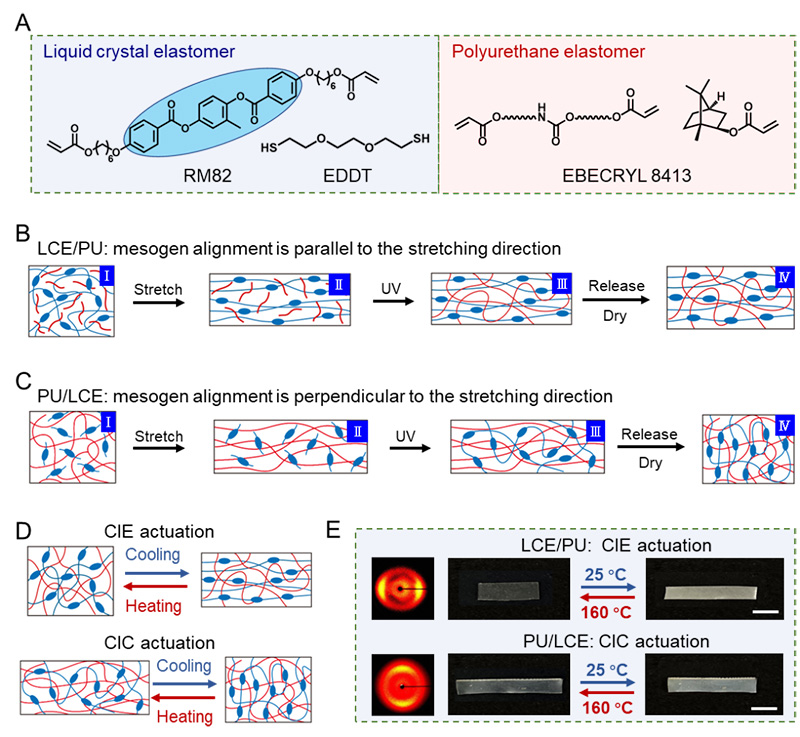
图1. 双网络驱动器的设计与编程
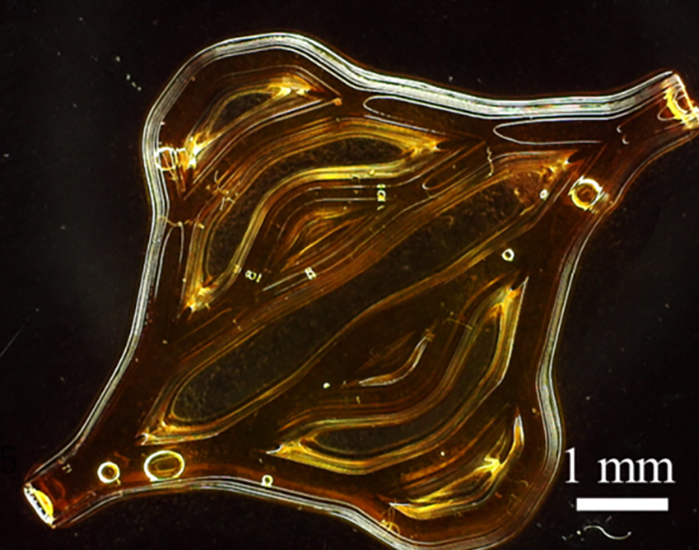
作者主要聚焦于区别传统驱动的PU/LCE的反向驱动模式。如图2所示,施加除拉伸外的编程作用力可以赋予PU/LCE诸如扭转、弯曲和剪纸拉花的复杂驱动行为。借助光固化3D打印得到具有特定三维形状的聚氨酯弹性体,进一步溶胀液晶并编程聚合,可以得到埃菲尔铁塔,章鱼和灯笼等一系列三维驱动器。驱动器的驱动动作取决于编程作用力形式,如图2D所示,同样的三维物体在施加线性拉伸,或者施加压缩、拉伸及扭转的组合力后,编程的差异使两者展现完全不同的驱动动作。但其驱动方向均为加热时向编程作用力方向变形,即展现冷收缩热延长的反向驱动模式。
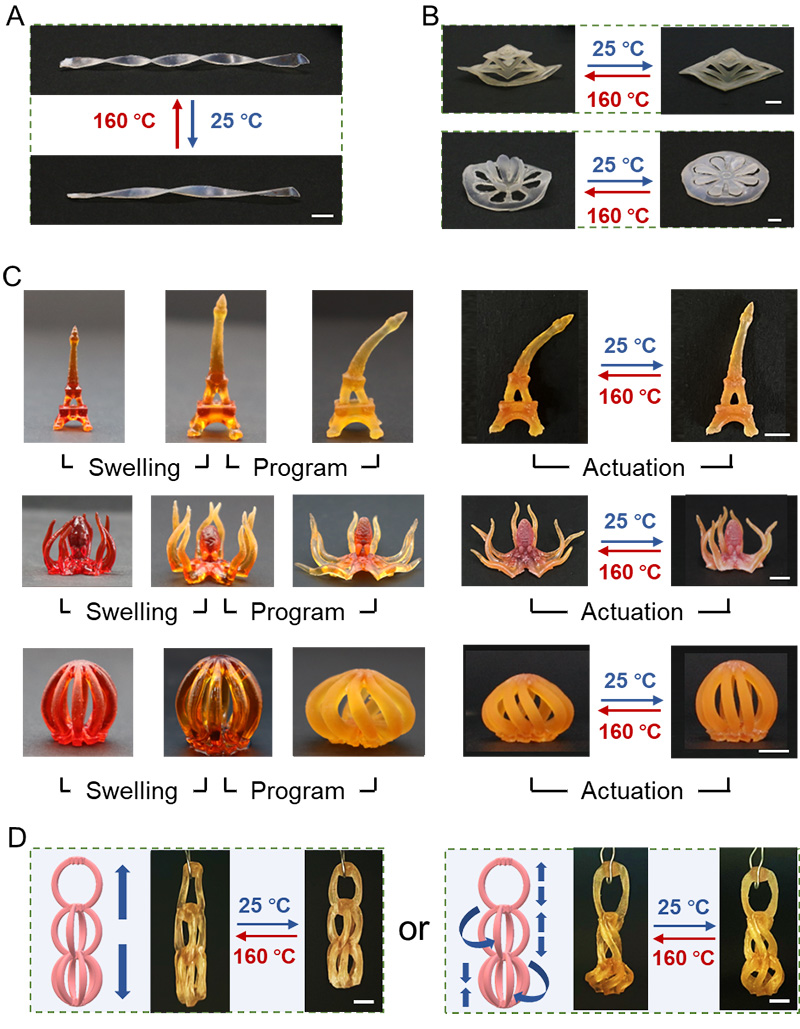
图2. PU/LCE的反向驱动行为
有趣的是,对PU/LCE在驱动过程中施加外力,可以在同一个样品中同时实现三种驱动模式。在无外力情况下,PU/LCE表现出冷收缩模式,施加外力与材料内部垂直应力抵消后,PU/LCE几乎没有驱动,随着外力继续增加,液晶基元从垂直排列转变为沿外力方向排列,因此PU/LCE表现出冷延长模式。图3B中的WAXD分析证实了驱动过程中施加外力导致液晶基元取向方向逆转的变化过程。结合激光切割或3D打印得到具有分级结构的样品,驱动过程中施加相同外力时,不同的区域会承受不同程度的应力,因此同一样品可同时表现不同的驱动模式,包括冷收缩(红色)、零驱动(绿色)和冷延长(蓝色)。
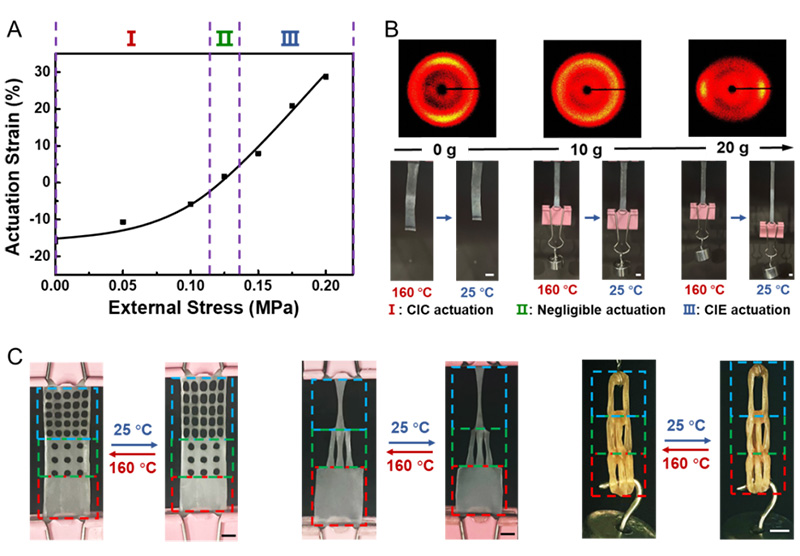
图3. 外力条件下PU/LCE的驱动模式调控
将两类具有相反驱动模式的材料组装到同一个驱动器中,可以实现传统LCE难以实现的复杂驱动。如图4所示,在加热和冷却切换下LCE/PU和PU/LCE可以展现出猜拳、拔河等模仿人类动作的行为。两类驱动材料不同的粘接方式会带来完全不同的驱动,如图4F所示,同样的样条由于粘接方式的区别,最终分别展现平面—平面,平面—三维以及三维—三维之间的驱动。进一步地,将导电铜箔附于LCE/PU和PU/LCE样条上,并搭建分别负责控制蓝色LED灯和红色LED灯的电路,该双控开关可以响应温度的变化从而控制电路,高温时点亮红色LED灯,低温时点亮蓝色LED灯,合适的长度设计使得中间温度可以同时点亮两盏LED灯。
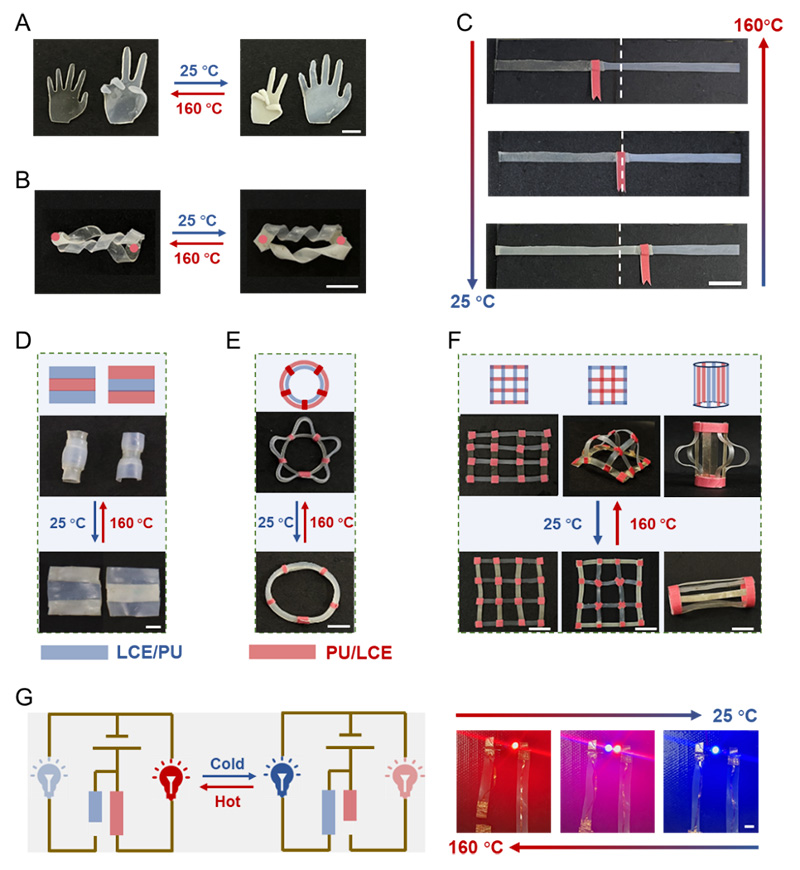
图4. LCE/PU和PU/LCE的组装驱动
原文链接:https://doi.org/10.1126/sciadv.adp4814