微纳3D打印驱动微型机器人智能磁群发展
发布日期:2024-12-30
浏览量:99次
群体机器人技术受到群体智能和机器人技术研究的启发,促进了机器人之间以及机器人与环境之间的交互。该方法论的核心在于利用多个机器人的集体行为协同完成复杂任务。这种合作依赖于去中心化、异层次的自组织结构,其中邻近机器人通过局部交互实现通信。去中心化的多机器人组织能实现群体智能,这一现象在自然界中颇为常见。例如,蚂蚁通过相互抓握形成高长宽比的组装体,以连接断开路径,甚至能在洪水中形成类似浮板的构造,从而保障生存。蚂蚁还通过化学通信觅食,并协同运输食物。社会性昆虫的多功能群体智能为群体机器人学提供了有益的启示。然而,在微型化机器人学领域,无电池和传感器的微型机器人群体控制面临挑战。为实现多功能群体智能,微型机器人需依赖无需传统车载传感器的无线通信技术。
微型机器人群体的驱动依赖于外部刺激,如光、声场和磁场。相较于传统机电机器人,微型机器人的无线通信和自主合作更为复杂。同时,由于质量较轻,微型机器人具有较低的惯性力和动能,这在克服环境粘性力或界面能量时构成限制。尽管增加微型机器人的数量可在一定程度上改善这一局限,但单个机器人的低动能仍限制了其功能性的扩展。
为此,来自韩国汉阳大学、仁荷大学的研究团队成功研发了一种具有磁各向异性特性的立方体微型机器人,其多功能群体智能系统可用于执行多种任务。这些微型机器人具备自我攀爬、跨越障碍、自我投掷、举起障碍物、货物运输、接线与断开、液态金属形状修改、管道疏通以及生物体引导等多重能力。可实现群体智能功能。相关研究成果以“Magnetic swarm intelligence of mass-produced, programmable microrobot assemblies for versatiletask execution”为题发表在期刊《Device》上。
该团队通过精心设计的磁化轮廓编码策略,成功实现了立方体微型机器人的磁各向异性,进而赋予了它们定向的磁性相互作用能力。此编程磁化轮廓的核心目的,在于降低磁偶极势能,进而使得这些微型机器人能够自发地、有序地磁性地组装成一维(1D)的确定性结构。
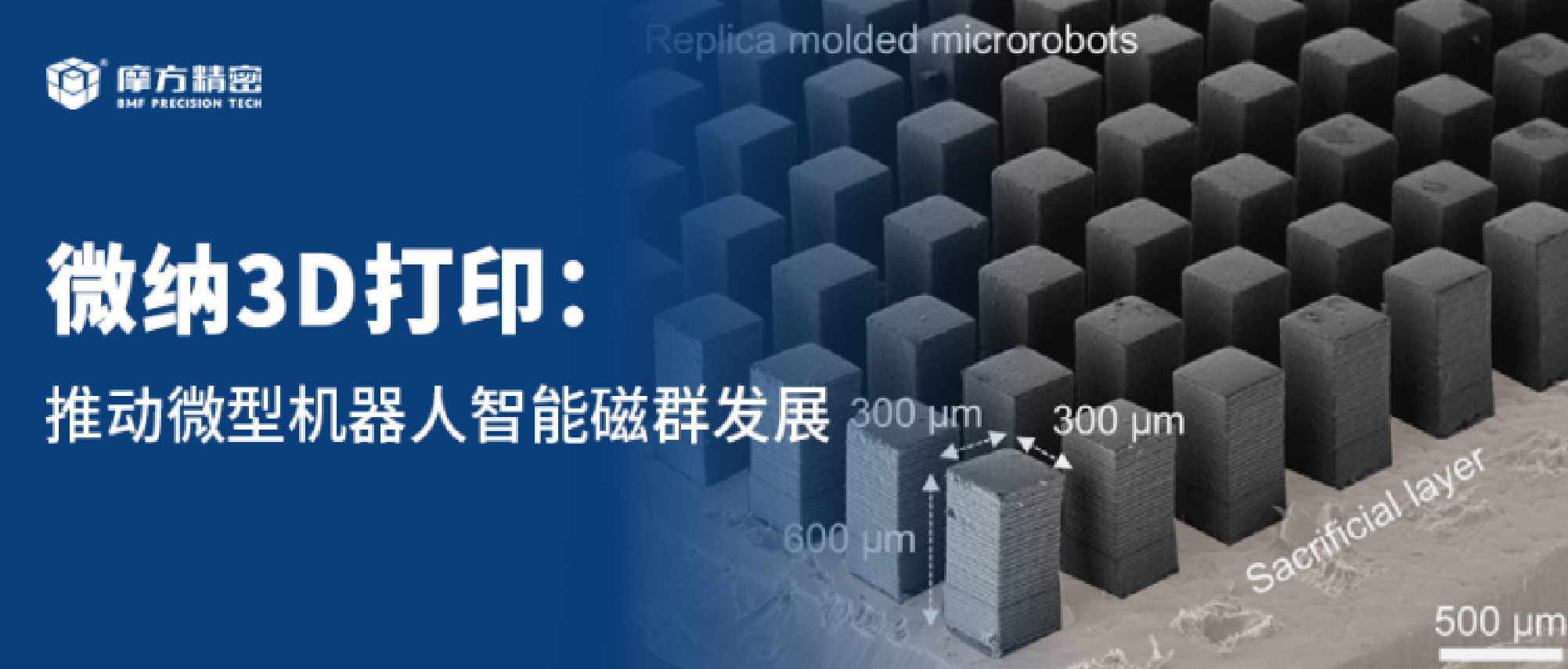
首先,该团队采用了原位复模和磁化技术(如图1A所示),设计了一个具有三维(3D)形状的立方体微阵列结构,该结构由数百个尺寸为300×300×600 μm3的立方体结构组成。利用这一单个模具,能够连续复制出磁各向异性的微型机器人,实现了时间和成本效益最大化的大批量生产,且原位复模和磁化过程可以确保微型机器人在几何形状和磁化轮廓上的均匀性。团队选用摩方精密面投影微立体光刻(PμSL)技术(nanoArch® S130,精度:2 μm)打印了该立方体微阵列模型原始模具,后经PDMS翻模技术成功制备该模型。

图1. 用于多功能群体智能的磁各向异性微型机器人的大规模生产。(A) 大规模生产数百个微型机器人的示意图。(B) 复制在牺牲层上的微型机器人。显微照片的伪彩色将牺牲层与微型机器人区分开来。(C) 微型机器人在外部磁场作用下的磁化曲线,磁化方向分别为0°、45°和90°。(D) 磁各向异性微型机器人的示意图,其中磁化方向为0°、45°或90°,相对于微型机器人的纵向方向。"M"表示磁化。(E) 四个微型机器人的磁组装,由于编程的磁化轮廓,形成HT、SC和FF配置。(F) 具有不同确定性组装特征的微型机器人群体执行多种任务。
微型机器人组装体的组装刚度受接触面积与体积比(CA/V)及组装体厚度的影响(图2A和2B)。实验表明,50个微型机器人的HT、SC和FF组装体的CA/V分别为3.1、4.6和6.2 mm-1,与理论计算相吻合。组装刚度亦与组装体厚度相关,因结构刚度随厚度增加而增强。FF组装体因高CA/V展现出较大厚度,获得较高刚度。HT组装体则因低CA/V,可获得更长组装长度,实现高长宽比。
在磁铁顺时针旋转下,微型机器人组装体执行顺时针旋转运动,由磁扭矩驱动。旋转运动包括旋转和枢轴运动,可通过改变磁场频率调节。FF组装体在旋转运动中保持最大数量的微型机器人组装,优于HT和SC组装体。HT组装体因长宽比高,可实现更长组装长度。
通过手动排列微型机器人成1D结构并施加剪切力,比较了组装特性。在2.5 Hz频率下,HT、SC和FF组装体的最大组装数量分别为14、18和24。HT组装体的旋转半径大于SC和FF组装体,展现了其更长的组装长度。非磁化微型机器人无法实现旋转运动,因磁扭矩不足。在低磁通量密度梯度下,展示了旋转运动,进一步验证了微型机器人的磁各向异性结构对旋转运动的贡献。
微型机器人组装体在执行群体行为时,展现出自主合作能力,如攀爬、行走、抛掷单个机器人越障和举起障碍物。这些合作行为由编程磁化轮廓引导,无需额外磁场控制。为优化枢轴运动高度,机器人群体在磁场y轴分量处驱动,实现高度攀爬。HT组装体因高长宽比,在攀爬时效率优于SC和FF群体。例如,八个微型机器人的HT组装体在5 Hz时能攀爬五倍于身高的障碍物,而SC和FF组装体则需更多机器人。攀爬后,HT组装体以最高速度行走,显示了磁化编程对任务执行的关键作用。非磁化微型机器人因磁化低且随机,无法有效攀爬和行走。
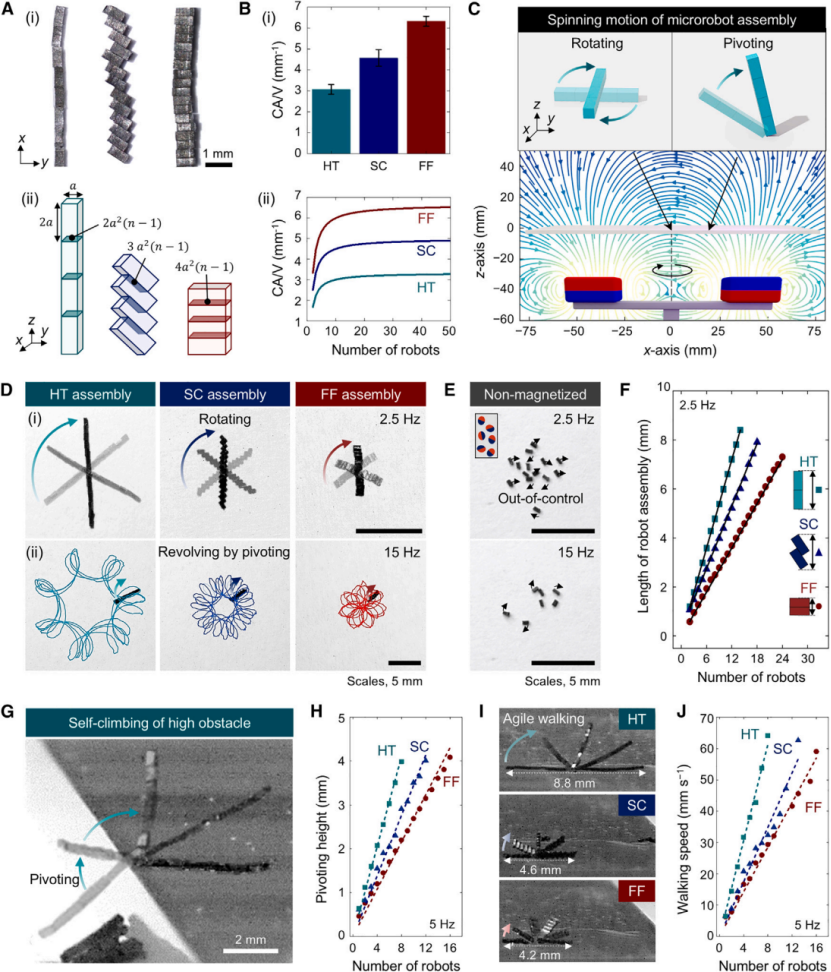
图2. 微型机器人组装体的组装刚度和旋转运动。(A) 不同组装配置的微型机器人组装体。(i) 在无外部磁场的情况下手动组装的微型机器人的数字图像。HT、SC和FF组装体的组成机器人数量分别为8、13和18。(ii) 微型机器人组装体的示意图。"a"代表机器人的短轴长度,"n"代表组装的机器人数量。(B) 依赖于组装配置的微型机器人组装体的CA/Vs。(i) 50个微型机器人之间的实验CA/Vs。(ii) HT、SC和FF组装体的理论CA/Vs。(C) 微型机器人组装体的旋转运动,包括旋转和枢轴运动。(D) HT、SC和FF组装体的旋转运动 (i)。HT、SC和FF组装体的枢轴运动和随后的旋转 (ii)。彩色线条代表旋转的微型机器人组装体的轨迹。机器人的数量分别为2.5 Hz时的14个和15 Hz时的7个。(E) 非磁化微型机器人的失控磁组装导致不规则旋转运动。
微型机器人组装体具备自主解体能力,可完成投掷过高为7 mm、宽为25 mm的障碍物(图3A)。当磁场旋转频率提升至15 Hz后,组装体产生的剪切力足以使末端微型机器人解体,实现高动量投掷。HT群体适用于此任务,因其高长宽比组装体增强了离心力,低组装刚度便于解体。例如,七机器人HT组装体解体时,投掷速度达1080 BL s-1,最大投掷高度20.6个身体长度,仅需110 ms克服障碍。
微型机器人群体还能通过组装体的集体机械扭矩举起障碍物(图3C)。HT群体因低组装刚度,可解体并钻入障碍物下方,通过枢轴运动提升障碍物。250个微型机器人的HT群体在2.5 Hz下能举起重量达1600倍单个机器人的障碍物1.9 mm,优于SC和FF群体。FF群体因高组装刚度,无法解体钻入,限制提升能力。HT群体还能通过集体机械扭矩滚动或推动球形货物和立方体障碍物。
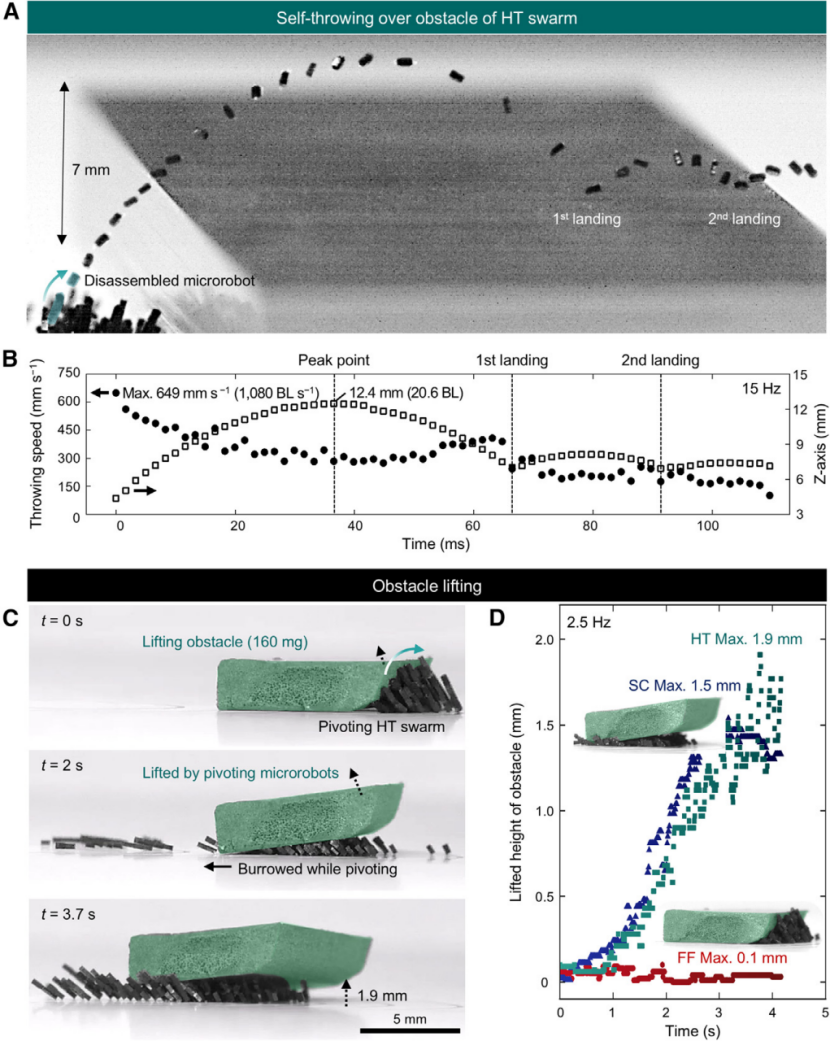
图3. 枢轴式微型机器人群体和高纵横比机器人组装体的群体智能。(A) HT群体在15 Hz时自主投掷过障碍物,通过叠加投掷微型机器人的图像得到证实。(B) 在15 Hz时,微型机器人的投掷速度和z轴位置。(C) 由250个微型机器人的HT群体在2.5 Hz时抬起障碍物。(D) 在2.5 Hz时,由HT、SC和FF群体各250个微型机器人抬起的障碍物高度。
在执行群体行为时,SC组装体在驱动基板中心旋转,相较于HT和FF群体,实现了最高的填充密度(图4A)。数百个微型机器人以最小化偶极子势能的方向组装,形成不同填充密度的2D群体。SC群体中,微型机器人磁性地互连,增加了邻近机器人数量。HT和FF群体则由相互排斥的组装体组成,邻近机器人数量较少。非磁化机器人因磁化程度低且方向随机,组装无序。
在10 Hz频率下,200个微型机器人的SC群体中,每个机器人平均有4.1个邻近机器人(图4C),而HT和FF群体分别为2.5和3.0。SC群体界面面积大,填充更密集。图像分析显示,HT群体由平均19个组装体组成,面积为10 mm2;SC群体单一组装体,面积为36 mm2;FF群体由平均5个组装体组成,面积为20 mm2。此外,通过分形维度和填充方向分析,对群体填充密度进行了定量比较。
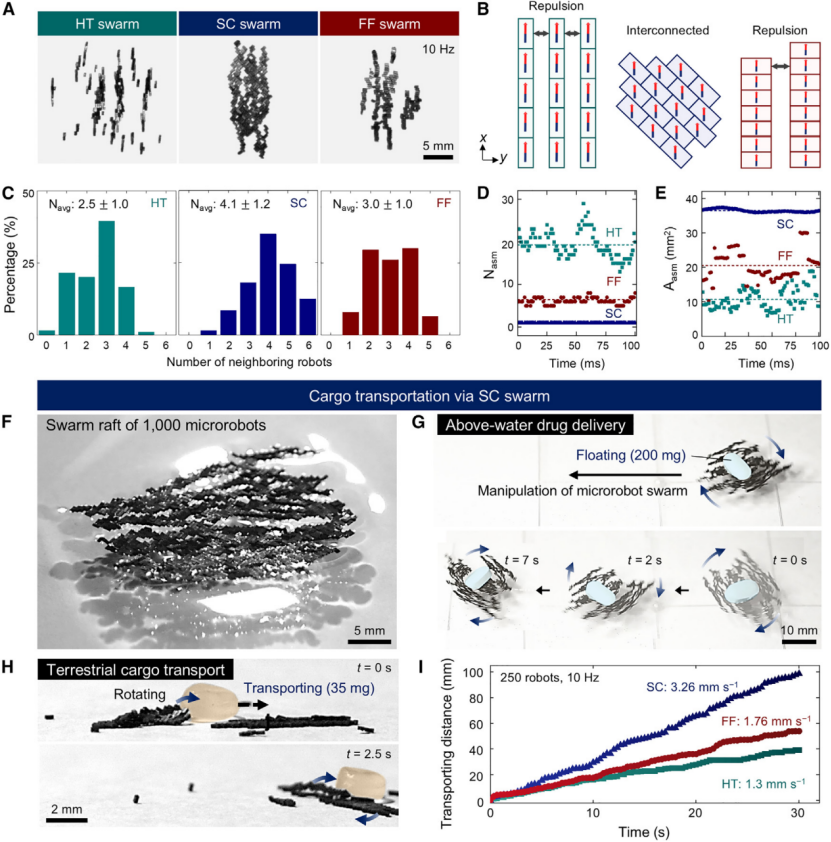
图4. 旋转微型机器人群体和高封装密度机器人组装体的群体智能。(A) 200个微型机器人在10 Hz时的旋转群体。HT、SC和FF群体的顶视图。(B) HT、SC和FF群体的封装结构示意图。(C) HT、SC和FF群体中相邻机器人数量的分布。(D和E) 在10 Hz时,HT、SC和FF群体中微型机器人组装体的(D) Nasm和(E) Aasm的图像分析。虚线代表Nasm和Aasm的平均值。(F) SC群体由磁力连接诱导的2D筏结构。SC群体的组成机器人数量为1,000。(G) 通过SC群体在1.5 Hz时进行的水面以上药物输送的时间推移图像。(H) 通过250个微型机器人的SC群体在10 Hz时进行的陆地货物运输。(I) (H)中所示货物的运输距离。
微型机器人群体通过旋转运动展现了多功能性,并能进行高效的轨道拖动运动(图5A和5B)。在轨道拖动中,组装体根据磁场分量抬起。HT和FF组装体在高速度下保持结构,FF组装体因高刚度达到最高Nmax。SC组装体Nmax最低,因多方向吸引力限制组装。非磁化机器人无法执行轨道拖动,凸显磁化编程的重要性。轨道拖动运动简化了障碍物绕行操纵,仅需单轴操作。FF群体在遇到障碍时,通过y轴操纵快速绕过。绕行后,降低Bmax梯度可恢复旋转运动。FF群体的高Nmax和驱动速度使其能产生巨大冲击力,适用于改变液态金属(LM)形状(图5F和5G)。面对LM的高表面张力和粘性,FF群体展现容错性,保持组装状态,成功分离和运输EGaIn,实现形状变形。
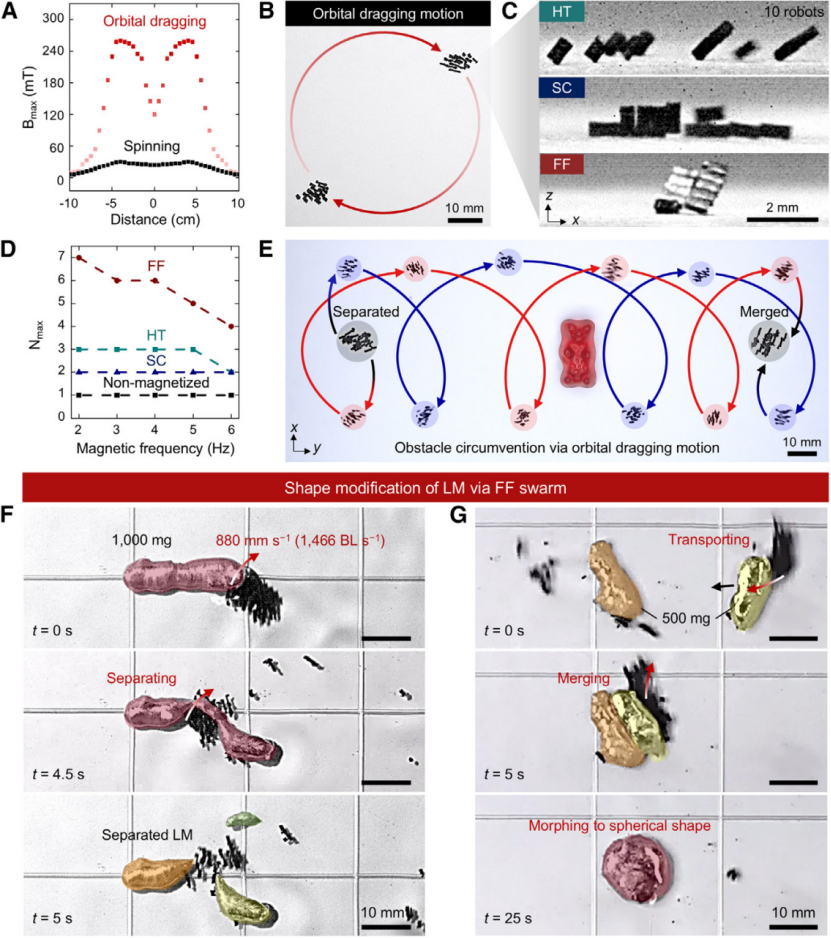
图5. 高刚度微型机器人组装体的轨道拖动群体及群体智能。(A)改变磁场Bmax以切换微型机器人群体的运动。对于轨道拖动运动,应用了高Bmax梯度,为7 T m^-1,而旋转运动的Bmax梯度为0.15 T m^-1。(B)在7 T m^-1下的轨道拖动,由200个微型机器人的FF群体在5 Hz时表示。(C)2 Hz时轨道拖动HT、SC和FF组装体的侧视图。(D)微型机器人群体在轨道拖动运动期间的Nmax。(E)FF群体通过2.5 Hz的轨道拖动运动绕过障碍物。(F和G)通过200个微型机器人的FF群体在5 Hz时对液态金属(LM)进行形状修改,如(F)分离和(G)运输、合并及变形。
具有容错性和敏捷性的FF群体成功完成了类似血管栓塞的管道疏通任务(图6)。为了模拟血栓环境,该团队使用剪切模量约为2.96 kPa的豆腐来堵塞管道,并用水填充管道。由于血栓的剪切模量通常为0.7 kPa,我们选择了机械性能略高于血栓的豆腐。在堵塞的管道中,FF群体展示了一种轨道拖动和旋转运动的结合,以与外部磁场方向保持一致。这种双重运动是因为FF群体无法沿着永磁体的旋转轨迹被豆腐这样的物理障碍拖动。在15赫兹的双重运动中,由200个微型机器人组成的FF群体产生了高冲击力。由于持续的高冲击力,豆腐被击碎,管道在40秒内被疏通。疏通后,通过操纵FF群体的方向,将残留的豆腐运输并移除,减少了再次栓塞的风险。
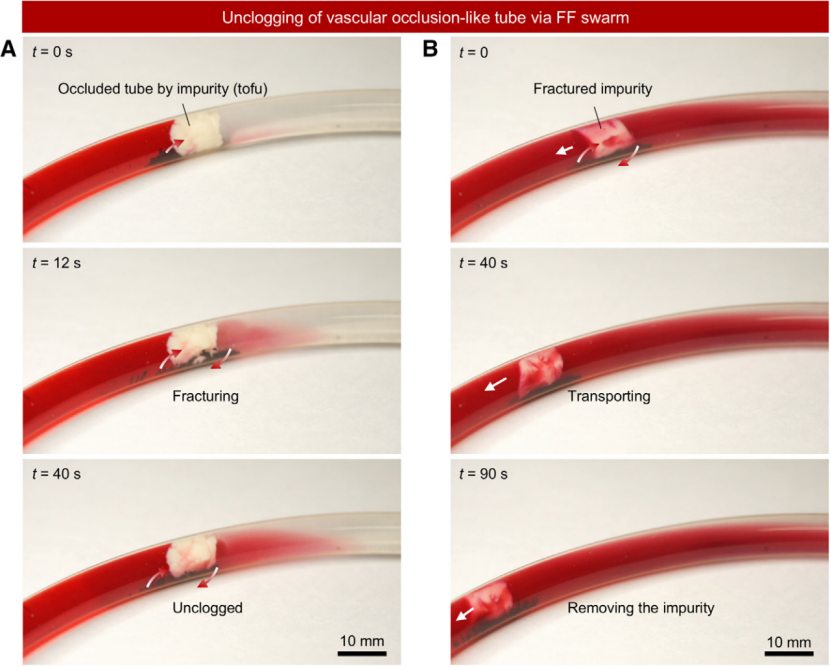
图6. FF群体清除血管闭塞类似管道的堵塞。时间推移图像显示(A)FF群体250个微型机器人清除管道堵塞和(B)移除管道内的杂质。由于堵塞管道狭窄,FF群体展现了旋转和轨道拖拽的复合运动。
该研究团队成功构建了一套基于微型机器人群体旋转与轨道拖动运动的生物引导系统。该系统通过调控运动模式间的转换,实现对施加于生物体之力度的精确控制。在2.5 Hz的旋转运动中,高填充密度的SC群体有效地引导了蚂蚁与团子虫。SC群体借助较低的冲击力,通过腿部动作阻碍蚂蚁,背部轻触阻碍团子虫,实现了无损运输至目标位置。然而,FF群体的轨道拖动运动因其高冲击力,不适宜引导小型生物,以免造成控制困难或损伤。蚂蚁与团子虫的质量分别为3 mg与30 mg,长度分别为3 mm与5mm。
进一步的挑战在于,是否能够利用高刚度的FF群体实现对超级蠕虫的按需喂食。超级蠕虫凭借触角上的化学感受器寻食,而FF群体在2.5 Hz的轨道拖动运动中,以其高冲击力有效阻隔超级蠕虫接近食物。即便超级蠕虫试图绕行,FF群体仍能持续阻挡其路径。停止轨道拖动后,超级蠕虫得以接近食物。由于旋转运动产生的剪切力不足以阻挡体重500 mg、体长35 mm的超级蠕虫,故不适用于喂食系统。微型机器人群体系统为生物体引导、运动控制及生长调节提供了新的策略。
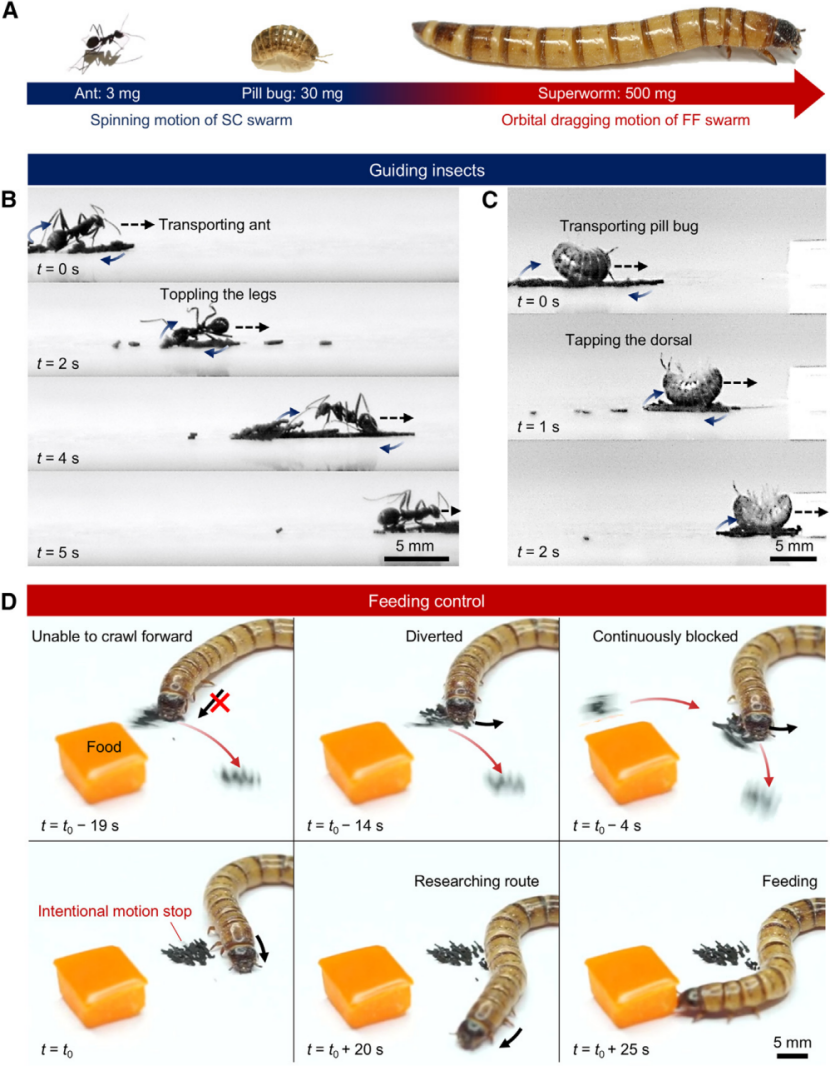
图7. 按需生物引导系统。(A) 根据生物体质量选择群体运动方式。(B和C) 200个微型机器人组成的SC群体以2.5赫兹旋转运动引导(B)蚂蚁和(C)团子虫的时间推移图像。(D) 200个微型机器人组成的FF群体以2.5 Hz轨道拖拽运动按需引导超级虫进食系统的时间推移图像。
总结:该研究研发了一种具有磁各向异性特性的立方体微型机器人智能磁群。通过高长宽比组装体内的程序化磁相互作用,促进了自我组织与自主合作行为,且无需外部磁场实时反馈,实现了群体控制的自主性。展望未来,量产微型机器人群体在机器人工程领域应用前景广阔,包括复杂障碍环境中的操作、高表面张力液体的形状控制、生物引导,以及为动脉硬化和平滑肌血栓提供生物医学解决方案。