摩方微结构3d打印应用-香港科技大学(广州)訾云龙教授团队《Science Advances》:识别材料柔软度和种类的摩擦电双模态触觉传感器
发布日期:2024-07-17
浏览量:1846次
皮肤通过种类丰富且分布广泛的触觉感受器,对外部环境进行敏锐感知。随着人工智能时代的兴起,具备类似皮肤感知能力的电子触觉系统备受关注,这种系统有望为机器人、假肢和执行器等设备提供真实的触觉感知。传统触觉传感器可以测量压力和温度等信息,但无法获取物体种类和柔软度等其他触觉维度的信息。传统应变传感器在检测物体柔软度时,由于其设计复杂且需要预设位移,这限制了其应用范围。因此,设计一种易于集成的触觉传感器,能够同时提供材料类型、柔软度和杨氏模量等信息,对推动多模态触觉传感器的发展具有重要意义和实际应用价值。
近期,香港科技大学(广州)訾云龙教授、夏欣教授和暨南大学杨希娅教授团队合作开发了一种基于摩擦电效应的双模态智能触觉传感器(BITS)。团队深入研究了摩擦电信号与材料柔软度的相关关系,将摩擦电效应电压/接触高度的关系及力学赫兹接触理论结合起来,使用接触高度和接触压力反应材料柔软度,实现材料柔软度和种类的识别并量化模量。该研究为推动类肤触觉传感器在多模态信号检测的应用提供了新的思路。
相关工作以“Biomimetic bimodal haptic perception using triboelectric effect”为题发表在学术期刊《Science Advances》上,香港科技大学(广州)博士生何少帅为第一作者,訾云龙教授、夏欣教授和杨希娅教授为共同通讯作者,香港科技大学(广州)为该论文的第一通讯单位。
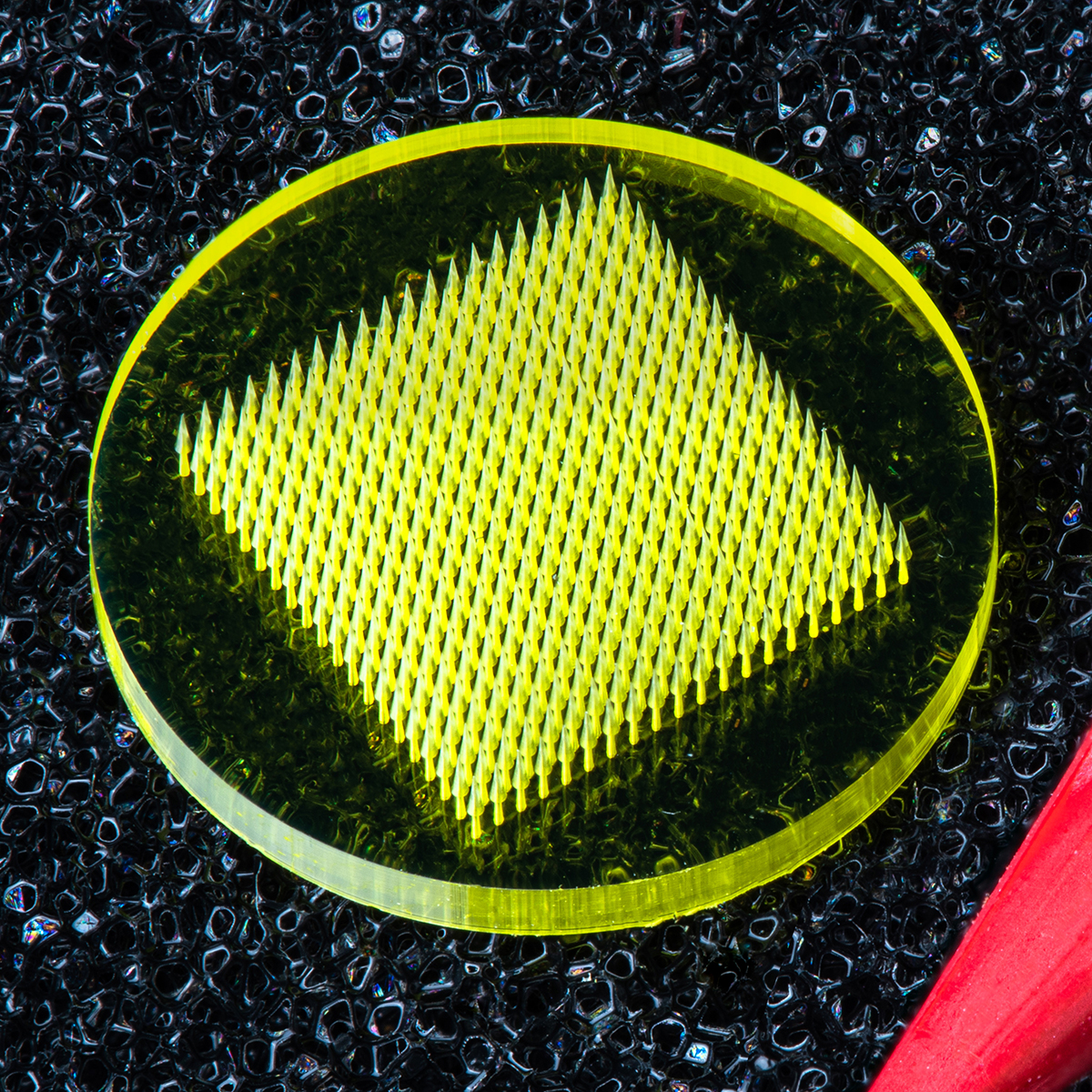
受昆虫钟型感受器结构启发,研究团队将BITS设计成半球顶结构。通过与不同柔软度物体接触时产生的不同电压信号幅度,从而确定接触高度,并结合力学赫兹接触理论和压力传感器,实现了材料柔软度的识别和弹性模量的量化,并利用摩擦电效应提取材料种类信息,借助机器学习算法,实现材料种类和柔软度的高准确度识别。研究团队进一步使用摩方精密面投影微立体光刻(PμSL)3D打印技术(nanoArch® S140,精度:10 μm)将BITS结构微型化,以便集成到电子皮肤中。
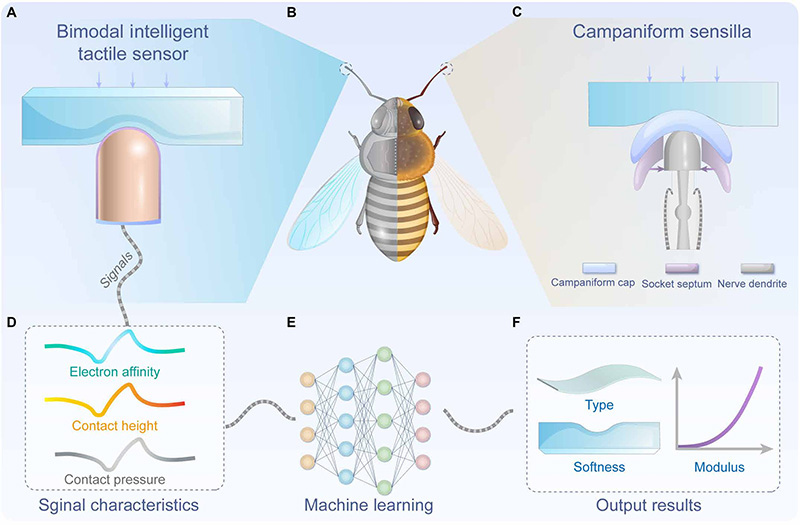
图1. 仿生双模态智能触觉传感器BITS的示意图。
通过实验和有限元模拟,研究团队发现当只有一个BITS时,电压与接触高度之间呈现二次方相关的关系。为了改善这种非线性关系,研究团队进一步引入具有较低高度的电极作为参比电极,从而将电压与接触高度之间的关系转变为线性关系,使得通过BITS能够获得精确可靠的接触高度数据。
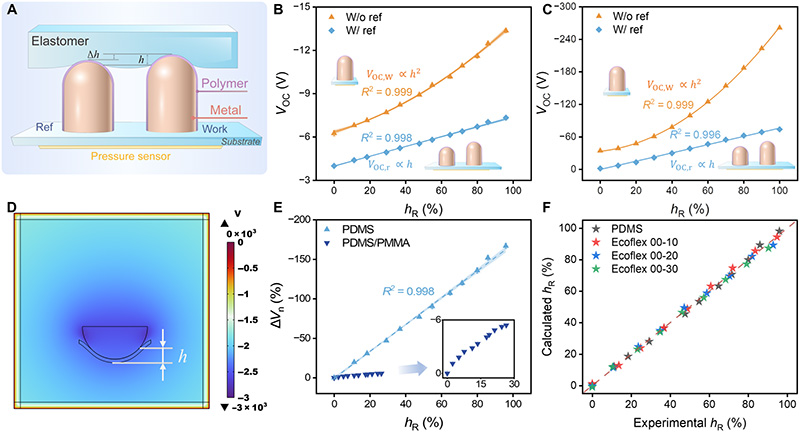
图2. 开路电压与归一化接触高度之间的关系。
团队研究了平面和半球形结构BITS对材料柔软度识别的能力,相比平面结构的BITS,半球形BITS可以区分出材料柔软度。团队在不同条件下(不同接触分离高度、湿度、不同摩擦层材料、不同待测样品及表面电荷密度)对半球形BITS的性能进行了测试,其中电压与接触高度之间的关系在所有条件下均保持线性。此外,BITS能够在长时间连续测试的条件下仍保持信号稳定。
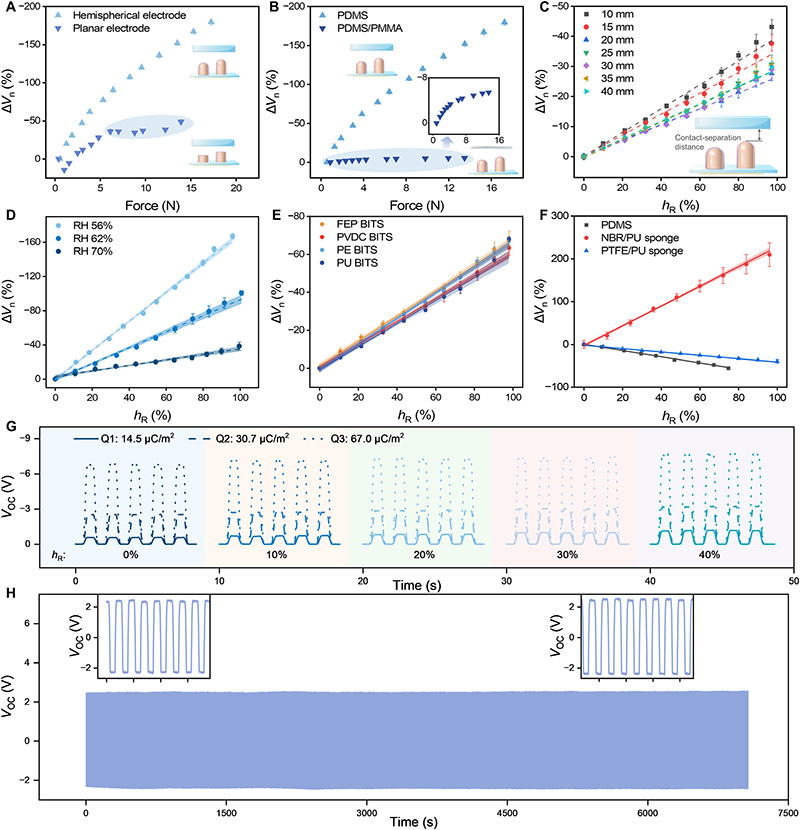
图3. 不同条件下BITS性能的稳定性。
这种可以测量接触高度的触觉传感器可以提供柔软度信息。研究团队使用该传感器结合压力传感器,模拟了手指靠近-接触物体并区分柔软度的过程。结合摩擦电效应,具有不同摩擦层的传感器对不同材料种类有不同的电压信号,借助机器学习可以实现高准确率的材料种类识别。此外,结合测量的接触高度和接触压力,可以对材料的弹性模量进行量化,作为材料柔软度的指标。
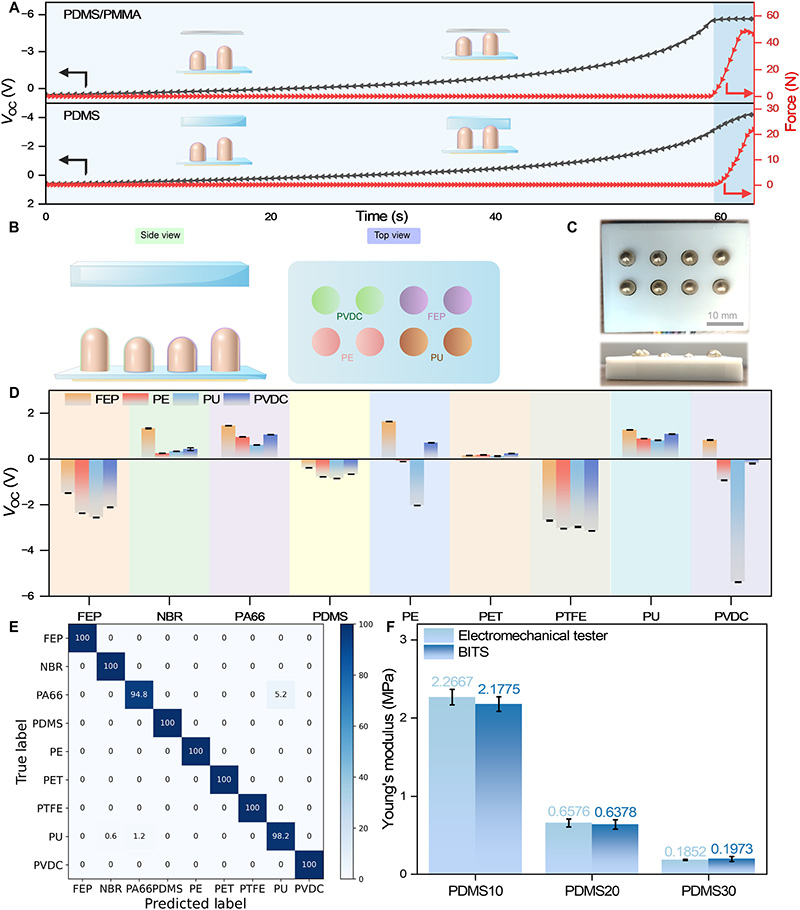
图4. 传感器对材料类型、柔软度识别和模量量化。
针对传感器尺寸,研究团队进一步使用摩方精密PμSL 3D打印技术制备了具有微米级别尺寸的BITS传感器,并使用图案化方法制备电极,不同尺寸的BITS传感器的电压与接触高度关系均呈现线性,验证了该传感器微型化的潜力,为电子皮肤获取更多维度信息提供了新的方案。
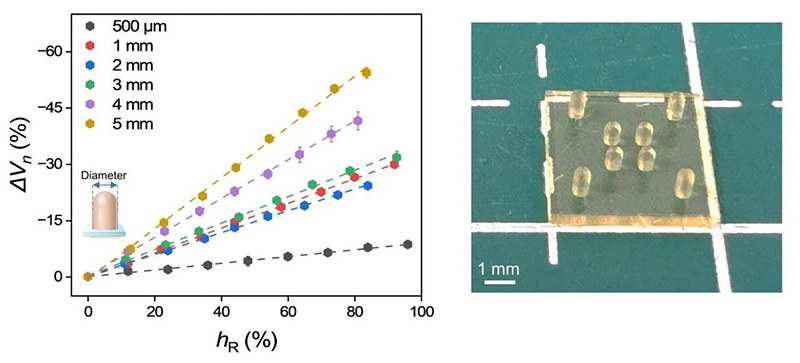
图5. 不同尺寸的传感器性能和使用PμSL 3D打印技术打印的传感器结构。
该团队利用不同摩擦层的传感器组成阵列,用于采集摩擦电信号进行材料种类和柔软度识别,并量化弹性模量,证明了该传感器在多模态触觉传感领域的应用潜力。
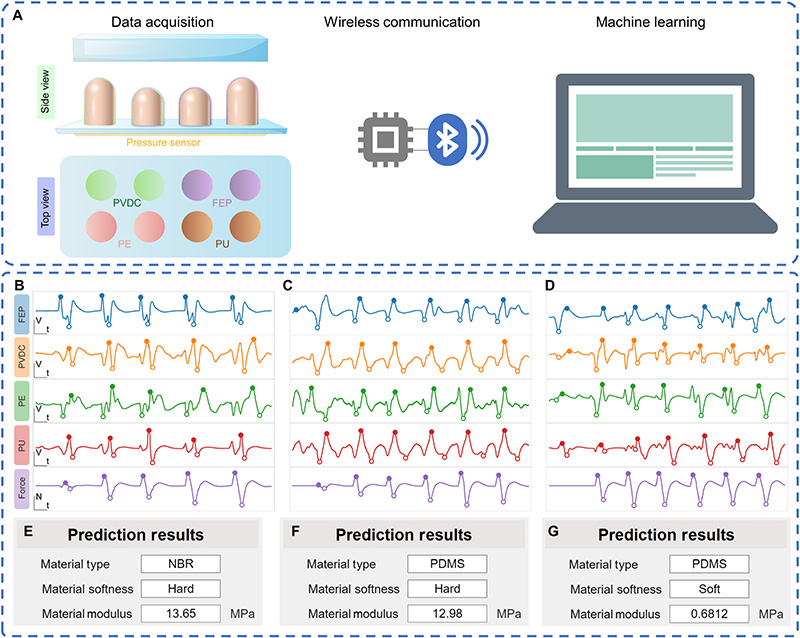
图6. 应用 BITS 阵列实现材料类型和柔软度识别。
综上所述,研究者受昆虫触角的启发提出了一种触觉感知策略,即利用摩擦电效应识别材料类型并量化物体的杨氏模量。通过进一步改进和技术升级,包括缩小设备尺寸,设计检测电路,集成到电子皮肤中,该传感器有望增强机器人和假肢触觉感知系统,在机器人技术领域广泛应用。
原文链接:
https://doi.org/10.1126/sciadv.ado6793